일론 머스크는 라이다(Lidar)를 상당히 싫어한다.
라이다는 Light Detection And Ranging의 약자로, 빛으로 주변 사물의 위치와 거리를 탐지하는 센서이다.
라이다는 빛으로 거리와 위치를 파악하기 때문에, 빛의 직진에 방해가 되는 악천후 환경에서 제약이 많다.
비슷한 건 레이더(Radar)가 있다.
레이더는 RAdio Detection And Ranging의 약자로, 전파를 발생시켜서 사물의 위치와 거리를 탐지하는 센서이다.
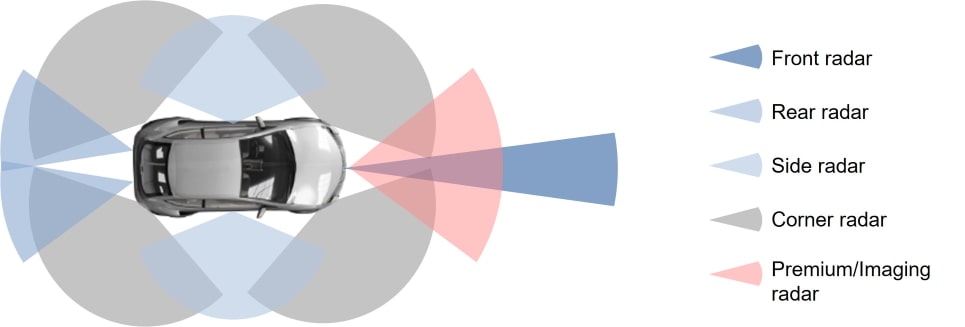
이 놈은 내연기관 차량에도 많이 들어가있는데, 주차할 때 벽에 닿을 것 같으면 시끄럽게 삐삐삐 소리를 질러대는 애들이 레이더이다.
레이더는 빛이 아니라 전파를 이용해 탐지하므로 날씨의 영향을 덜 받는다.
일론은 라이다가 일단 차량의 미관을 망치는 주요 원인이기도 하고, 기능적으로도 불필요하다고 주장해왔다.

이건 뭐 매드맥스에 나오는 두프웨건도 아니고...
일론의 요지는 가격이 문제가 아니라는 것이다. 기능적으로 필요했다면 가격이 비싸더라도 사용했을 했을것이라고 언급한 적이 있다.
일견은 맞는 말 같기도 하다. 개인적으로도 그렇게 생각했었고... 아래 사진처럼 여기저기 라이다와 센서로 덕지덕지 삐죽 튀어나온 저런 거지 발싸개 같이 생긴 차를 누가 내 돈주고 자차로 구입하고 싶겠는가? 이 말이다.

근데, 만약에 애초에 "직접 운전을 목적으로 하는 개인이나 법인 판매를 위해 판매하는 자동차"가 아니라면?
애초에 처음부터 남을 태우는 데에 목적이 있는 대중교통인 택시나 버스를 목표로 자율주행을 연구하고 있다면, 차량 미관이랑은 아무 상관이 없는 것 아닌가?
우리는 버스나 택시를 타면서 대중교통의 외관에 대해서 생각하지 않는다. 네모나게 생겼든, 옆면에 헬로 키티가 그려져있든, 한방병원 광고가 붙어있는 신경을 쓰지 않는다. 애초에 "내 차가 아니니까".
그냥 목적지까지만 데려다주면 끝인 것이다.
그렇다면 솔직히 말해서 자율주행 택시는 라이다나 센서들이 덕지덕지 달려서 개 못생겼다 한들, 도대체 타는 승객은 누가 신경이나 쓸 것이냐?라는 말이다. 목적지 까지만 싸고 빠르고 가면 되지...
이 논지는 단순히 디자인에 한정되는 문제가 아니라, 카메라만 사용하는 테슬라 vs HD맵 + 라이다를 기반으로 하는 구글 웨이모로 대표되는 각 자율주행 진영의 접근법과도 관련이 있다는 생각이 든다.
현재 국제자동차기술자협회(SAE International)가 제정한 J3016 표준은 자율주행 기술을 0부터 5까지 총 6개의 레벨로 정의 된다.
레벨 0 (자동화 없음): 운전자가 모든 주행 작업을 수행함.
긴급 제동 시스템(AEB)과 같은 일시적인 안전 개입 기능은 이 레벨에 포함될 수 있으나, 지속적인 주행 제어는 없음.
레벨 1 (운전자 보조): 시스템이 조향 또는 가감속 중 하나를 지속적으로 보조.
대표적인 예로 어댑티브 크루즈 컨트롤(ACC)이 있으며, 운전자는 나머지 주행 작업을 모두 책임짐.
이 단계가 현재 가장 널리 사용되고 있는 수준이라고 보임
레벨 2 (부분 자동화): 시스템이 조향과 가감속을 동시에 지속적으로 보조합니다.
Tesla의 오토파일럿이나 GM의 슈퍼 크루즈가 여기에 해당.
하지만 이 레벨의 가장 중요한 특징은 ...
자율주행 택시에 대한 생각 (테슬라, 웨이모)

911GT3RS
2025.09.25조회수 247회
회원가입만 해도
이미 계정이 있으신가요?로그인하기
댓글 16개
911GT3RS
구독자 1,961명구독중 105명
Hybrid Theory